Исполнительные механизмы RC-аппаратуры
Обзор схемотехники аппаратуры для дистанционного пропорционального управления моделями не будет полным, если не рассказать об исполнительных механизмах (устройствах) - о рулевой машинке, часто ее еще называют - "серва" и регуляторах хода.
Сразу отметим, что эта статья является обзорно-аналитической, и несмотря на то, что мы приведем здесь пару вариантов принципиальных схем сервоэлектроники рулевой машинки (РМ), повторять их не рекомендуем, т.к. по опыту знаем, что в домашних условиях качественно изготовить микроминиатюрную электронику, а особенно - механику (микродвигатель и редуктор) - нереально. Именно поэтому мы не разрабатывали и не будем разрабатывать печатные платы для этих схем. В тоже время, самостоятельная сборка простого регулятора хода по хорошо отлаженной схеме, вполне доступна даже начинающему моделисту.
Материал данной статьи, касающийся рулевых машинок, может найти практическое применение только при конструировании простых исполнительных механизмов для каких-либо прикладных устройств, скорее всего не связанных с моделизмом. Тем не менее, знакомство с конструкцией и принципом работы рулевой машинки необходимо для понимания основ всей системы пропорционального дистанционного управления.
Рулевая машинка
Назначение рулевой машинки очевидно: она предназначена для того, чтобы пропорционально и синхронно с ручкой управления на передатчике изменять положение руля управления модели, развивая при этом необходимое усилие.
Пропорциональность управления определяется шириной (длительностью) канального импульса и точностью его формирования, передачи и обработки всеми звеньями радиоканала (кодер - передатчик - приемник - декодер - сервоэлектроника). Этот параметр зависит как от внешних факторов, так и от свойств самой РМ. Синхронность (обычно этот параметр заменяют "временем перекладки" из одного крайнего положения в другое), так же, как и развиваемое усилие, параметры исключительно "внутренние", они зависят от конкретной конструкции РМ: от мощности электромотора, его оборотов и передаточного числа (отношения) редуктора. Кроме того, есть еще один очень важный критерий оценки качества рулевой машинки - точность позиционирования, т.е. точность установки исполнительного органа РМ в заданное положение. Время перекладки РМ обычно измеряется в "секундах /градус" (лучшие образцы машинок имеют "резвость" порядка 0.1 - 0.07 сек / 45 град), точность позиционирования - величина угловая, и измеряется в градусах (типичная величина ~ 0.5 - 1.0 град), а усилие измеряется в кг/см или Н/см (здесь разброс показателей очень велик, он зависит от конкретного типа машинки и может колебаться от 0.5 кг/см (5 Н/см) до 15 кг/см (150 Н/см) и более).
Следует иметь в виду, что параметры "скорострельности" и "мощности" РМ связаны между собой: чем быстрее машинка (при прочих равных условиях), тем меньшее усилие на валу она способна развить, и наоборот. Не стоит при выборе машинки обращать особого внимания на ее скоростные качества - быстроты реакции даже самой "тупой" сервы обычно хватает для большинства типов простых моделей. В хоббийном моделизме гораздо большее значение имеет "тяговитость" механизма, т.к. этот параметр обычно косвенно характеризует и его механическую прочность.
Сервоэлектроника
Импульсный широтно-моделированный сигнал (см. Рис.1.) с выхода декодера поступает на одновибратор ОВ рулевой машинки, аналогичный описанному в статье "PPM-кодер для RC-аппаратуры". Длительность импульсов, генерируемых этим одновивибратором, регулируется потенциометром R, жестко связанным с выходным валом мотора-редуктора РМ и однозначно зависит от его положения. В среднем положении вала мотора-редуктора длительность импульсов на выходе ОВ равняется 1.5 мс, как вы помните, такую же длительность имеют канальные импульсы при среднем положении ручки управления. При повороте вала мотора-редуктора из одного крайнего положения в другое, длительность "опорных" импульсов на выходе одновибратора будет изменяться примерно от 0.7 мс до 2.3 мс. Это чуть больше, чем изменение длительности канальных импульсов при отклонении ручки управления, и необходимо для предотвращения поломок механики РМ.
В случае несинхронного отклонения ручки управления или поворота вала мотора-редуктора, длительность канального или "опорного" импульсов изменится, и они уже не будут равны между собой. Именно эта разница в длительности двух импульсов и позволяет осуществить "пропорциональность" управления. Оба импульса (входной импульс РРМ и импульс с выхода ОВ) подаются на схему сравнения. Схема сравнения имеет два входа и два выхода и работает очень интересно. Если к обоим ее входам приложить уровень логического "0", то на обоих выходах также установится уровень логического "0". Если же к одному из входов (допустим, ко входу "А") приложить уровень логической "1", то на соответствующем ему выходе "А" также установится высокий уровень логической "1", который независимо от последующих изменений состояния входа "В" будет сохраняться до того момента, пока оба входа не будут вновь "обнулены". Если же после "обнуления" высокий уровень первым приложить ко входу "В", то уровень логической "1" установится уже на выходе "В", и также будет сохраняться до момента "обнуления" обоих входов. Но если после обнуления высокий уровень одновременно установить на обоих входах схемы, состояние выходов не изменится, т.е. останется "низким". Такой алгоритм гарантирует, что в любой момент времени высокий уровень может быть только на одном из выходов схемы.
Рис.1 Блок схема сервоэлектроники рулевой машинки
С выходов "А" и "В" схемы сравнения сигналы поступают на входы двухканального релейного усилителя (усилителя-переключателя), к которому подключен электродвигатель рулевой машинки. В нормальном состоянии выходы обоих каналов усилителя "низкие", т.е. они оба имеют потенциал "земли". В случае поступления на любой из входов усилителя логической "1" на его соответствующем выходе устанавливается высокий потенциал, равный напряжению источника питания. Электродвигатель начинает вращаться, сразу же развивая полную мощность. Как только соотношение длительностей импульсов на входе схемы сравнения изменится, после очередного "обнуления" высокий уровень будет установлен на другом входе усилителя-переключателя, электродвигатель "реверсируется", т.е. начнет вращаться в другую сторону. При такой схеме двигатель постоянно развивает максимальную мощность, а время переходных процессов практически сведено к нулю. Такая сервоэлектроника в последнее время называется "цифровой".
В обычных, "аналоговых" схемах сервоэлектроники происходит сравнение длительности импульса входного РРМ сигнала и импульса ОВ, после чего формируется очень короткий "разностный" импульс. В зависимости от длительности и полярности этого "разностного" импульса и формируется сигнал управления электродвигателем, который в такой схеме подключается одним выводом к искусственной "средней" точке источника питания и по этой причине всегда работает "в пол-силы". Не смотря на то, что короткий "разностный" импульс искусственно "растягивается", при таком способе очень трудно получить высокие "нагрузочные" характеристики РМ, т.к. двигатель практически никогда "не отдает" в нагрузку максимально возможного усилия. По этой причине "цифровые" сервы по основным параметрам намного превосходят стандартные "аналоговые".
Рассмотрим подробнее, как происходит процесс управления "цифровой" рулевой машинкой. Пусть в начальный момент времени ручка управления на передатчике и исполнительный орган (вал мотора-редуктора) установлены в среднее (нейтральное) положение. Длительность канальных импульсов РРМ равна длительности импульсов одновибратора ОВ: Т' = Т" = 1.5 мс. Это состояние можно назвать "балансом импульсов". На выходах схемы сравнения постоянно присутствуют низкие уровни логического "0". Такие же потенциалы установятся и на обоих выходах усилителя-переключателя. Электродвигатель мотора-редуктора не вращается.
Рис.2 Логическая диаграмма работы схемы сравнения
Допустим, что отклонение ручки управления на 1 градус в ту или иную сторону вызывает увеличение (или уменьшение) длительности канального импульса на 0.01 мс (коэффициент пропорциональности К = 100 град/мс). Как только мы отклоним ручку управления на какой-либо угол (к примеру - на 26 градусов) и зафиксируем ее, длительность канального импульса также изменится, предположим - уменьшится на 0.26 мс (см. Рис.2). Это приведет к тому, что положительный фронт канального импульса РРМ попадет на вход схему сравнения на 0.26 мс раньше положительного фронта импульса одновибратора ОВ. На выходах "А" схемы сравнения и усилителя-переключателя установятся высокие потенциалы, а электродвигатель начнет вращаться, допустим, по часовой стрелке, изменяя положение вала мотора-редуктора и связанного с ним ползунка потенциометра R. Возникнет "механическая обратная связь", которая изменив положение ползунка потенциометра R изменит и длительность импульса одновибратора также в сторону уменьшения. Через какое-то время (оно зависит от оборотов электродвигателя и передаточного отношения редуктора) ползунок потенциометра R, связанный с выходным валом мотора-редуктора, повернется на 26 градусов и установится в такое положение, при котором длительность импульса ОВ также уменьшится на 0.26 мс и снова сравняется с длительностью импульса РРМ. На выходе "А" схемы сравнения установится низкий уровень, и электродвигатель остановится. Если теперь ручку управления вернуть в нейтраль, или отклонить в другую сторону, схема сравнения "отработает" по каналу "В", электродвигатель начнет вращаться против часовой стрелки, изменяя положение ползунка резистора R в другую сторону и увеличивая длительность импульса ОВ, "уравнивая" его с импульсом РРМ.
Если же "разбалансировка" импульсов произойдет не по команде спортсмена, а от самопроизвольного перемещения руля управления модели, допустим под воздействием аэродинамических сил (нагрузок), то и в этом случае система "автосбалансируется", и компенсирует изменение положения рулей модели, приведя их в соответствие с положением ручки управления на передатчике.
Сервомеханика
Рассматривая работу сервоэлектроники мы идеализировали кинематику рулевой машинки, и не принимали во внимание физические свойства ее составляющих. Но детали, из которых состоит "мотор-редуктор" обладают массой, и в следствии этого - инерционностью. Естественно, что инерционность подвижных деталей, от положения которых зависят времязадающие параметры "опорного" одновибратора, будет вносить значительные возмущения в работу всей электронной части рулевой машинки, и должна быть каким-то образом компенсирована.
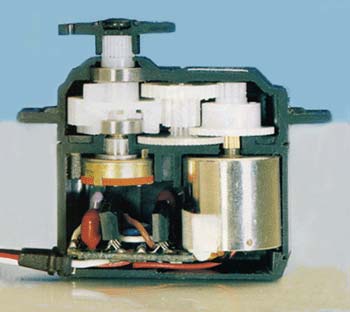
При разработке рулевых машинок используются конструктивные решения, позволяющие снизить массу вращающихся с большой скоростью частей и применяют конструкционные материалы, демпфирующие их кинетическую энергию. Типичная конструкция рулевой машинки показана на Рис.3.
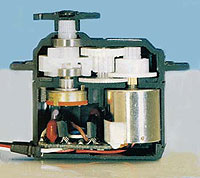
Рис.3 Конструкция типичной РМ фирмы Robbe-Futaba
Диаметр типичного микро-электродвигателя для РМ всего 10 - 15 мм, длина - того же порядка. Масса такого электродвигателя в сборе порой не превышает 10 грамм. Масса ротора при этом - не более 2-3 грамм, но число оборотов в минуту может превышать 20.000! При таких оборотах даже субминиатюрный ротор диаметром 7 - 10 мм и массой около 1.0 грамма обладает внушительным запасом кинетической энергии, которая не позволяет ему мгновенно остановиться при отключении электропитания. Инерционное вращение ротора приводит к "выбегу" исполнительного органа на несколько градусов и обратной разбалансировке схемы сравнения, которая реверсирует двигатель, он начинает вращаться в обратную сторону, снова "выбегает" и т.д. Этот "колебательный" процесс может длиться бесконечно...
Для того, чтобы избежать этого, в цепи сервоэлектроники вводят отрицательную обратную связь, так называемое "электронное демпфирование", которое позволяет обесточить двигатель чуть раньше, чем электронно-механическая система РМ достигнет точки "баланса импульсов". Эта простая мера имеет один существенный недостаток: у системы появляется так называемая "мертвая зона" - область, в которой схема сравнения не реагирует на относительное изменение длительности импульсов. От величины "мертвой зоны" зависит точность позиционирования РМ, параметр, о котором мы упоминали в начале этой статьи. У современных РМ величина "мертвой зоны" (это угол поворота вала мотора-редуктора) и точность позиционирования не превышает долей градуса.
Наряду с электронным демпфированием применяют и механическое демпфирование (не путать с механической обратной связью). Шестерни редуктора часто изготавливают из достаточно "вязких" пластмасс: капрона, полистирола или полиамида (для увеличения прочности их часто армируют стекловолокном или другими волокнистыми наполнителями). Материал шестерен, наряду со специальным модулем и профилем зубьев несколько ухудшает общую динамику РМ, "подтормаживая" электродвигатель, но зато существенно уменьшает величину инерционного "выбега" и позволяет сузить "мертвую зону".
Вообще, конструкция редуктора РМ достаточно сложная. Попробуем рассчитать редуктор для РМ с электродвигателем, развивающим 15.000 об/мин. Примем время "перекладки" выходного вала РМ из одного крайнего положения в другое (т.е. поворот примерно на 180 градусов) равным 0.5 секунды. Несложная арифметика показывает, что общее передаточное отношение такого редуктора будет равно 1 : 250. С учетом габаритных размеров корпуса миниатюрной РМ (ширина ~ 10 -12 мм) максимальный диаметр шестерни может быть не более 10 мм. Модуль зуба определит диаметр малой шестерни: он будет ~ 2,5 мм. Отсюда передаточное отношение одной пары шестерен: 10 / 2.5 = 4.0, а необходимое число пар шестерен в редукторе оказывается равно четырем. На практике все пары шестерен в миниатюрных редукторах делают разными, их число достигает 5 - 8, а передаточное число редуктора может быть даже 1 : 1000. Часто 2-3 выходные, самые нагруженные пары шестерен изготавливают из металла, а последнюю, самую мощную шестерню иногда делают не полной окружности, а в виде сектора ~ 200 градусов и ее ось устанавливают в шарикоподшипники . С этой шестерней обычно и бывает "аксиально" (соосно) связан потенциометр R (это хорошо видно на Рис.3). Кстати: машинки с цельнометаллическим редуктором обычно имеют более высокий КПД, и способны развивать большее усилие на валу, но более "строги" в регулировках и имеют больший инерционный выбег (см. Рис.4). Необходимо так же отметить, что механика РМ не должна иметь каких-либо люфтов: наличие даже незначительной "слабины" хотя бы в одном сопряжении рулевой машинки резко ухудшает ее позиционирование и расширяет "мертвую зону".

Рис.4 Рулевая машинка с цельнометаллическим редуктором
Продолжение:
Примеры принципиальных схем сервоэлектроники
И.В. Карпунин (aka Glider)
Обсудить на форуме
|