|
Строим мультикоптер сами - шаг за шагом.
Часть вторая. Этапы строительства.
Определение конфигурации аппарата
Для начала строительства необходимо определить конфигурацию будущего летательного аппарата. Для квадрокоптера большинство любителей выбирают схему Quadro-X, она означает, что аппарат будет лететь вперед развалом между балками первого и третьего двигателей, как показано на рисунке:

Именно такую схему и будем мы реализовывать. Следует заметить, что аппарат для другой конфигурации будет отличаться лишь местами крепления Основной платы (она должна крепиться стрелкой, нанесенной в одном из углов - в направлении предполагаемого полета), в остальном представленный ниже алгоритм остается прежним.
Поготовка центральных пластин
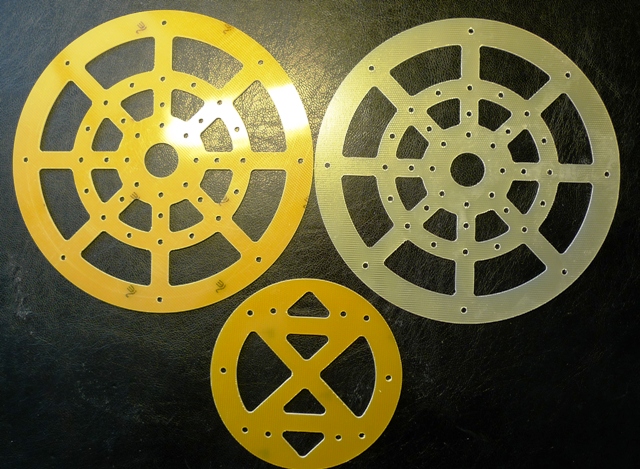
Балки двигателей будут скреплены в центре пластинами из стеклотектолита:
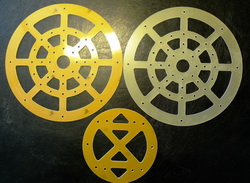
Две большие пластины - разной толщины, из более толстого материала - нижняя, из более тонкого - верхняя.
Балки двигателей будут зажиматься между этими пластинами. Но перед тем, как это сделать, необходимо пластины подготовить.
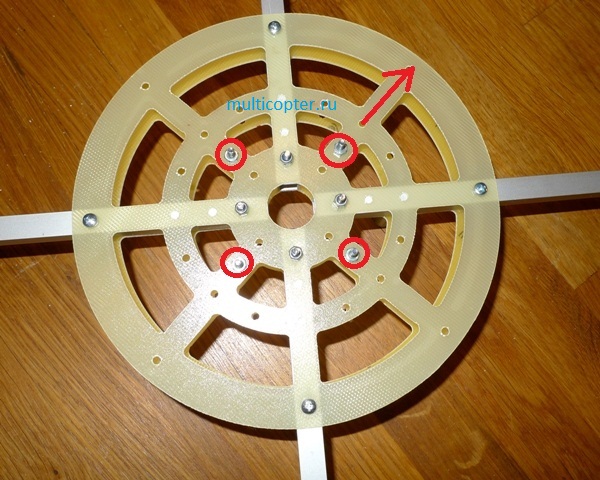
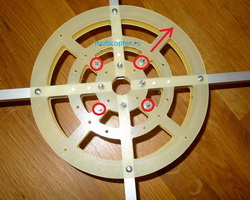
К верхней пластине в указанных местах приворачиваем на гайках болты, выступающие части которых будут служить для установки пластиковых стоек, на которые будет устанавливаться плата-адаптер с контроллерами двигателей:

Показанным на фото зенкером (или сверлом большого диаметра) аккуратно расширяем указанные отверстия для обеспечения "утопленности" шляпки болтов, которые будут крепить пластину для батареи:

Из алюминиевой трубки диаметром 6 мм нарезаем отрезки длиной, на 8 мм больше толщины аккумуляторной батареи, которая будет применяться с мультикоптером - это будут стойки, которыми пластина для батареи будет крепиться к нижней центральной пластине. Края обрезков трубки обжимаем плоскогубцами:

Болтами М4 с потайной шляпкой длиной 10-15 мм прикручиваем изготовленные ранее стойки к нижней центральной пластине - стальные болты нарежут резьбу в обжатой трубке, чем будет обеспечено надежное соединение, которое позволит выдержать вес аккумуляторной батареи и камеры с подвесом:

При заворачивании болтов в трубки удерживаем их плоскогубцами, получаем вот такой результат:

Разметка и сверление балок двигателей
Для разметки балок необходимо определить длину одной балки, которая зависит от размера применяемого пропеллера, который, в свою очередь, зависит от применяемого двигателя. В нашей модели мы будем использовать пропеллеры размером 10х4,5 с двигателями AXI 2217/20. Практикой установлено, что оптимальный размер балки двигателя должен составлять 30-33 см от оси двигателя до центра Основной платы.
Нарезаем из алюминиевого профиля 10х10 мм четыре балки длиной 34 см.
Двигатели будем крепить не к самому краю балки, а немного отступив от него, для того, чтобы предотвратить повреждение двигателя при ударе балки о землю при неудачном падении.
Для разметки балки для двигателей, располагаем крепежную пластину для двигателя на краю балки и, используя крепежную пластину как трафарет, намечаем места отверстий:

На другой стороне балки, используя одну из центральных пластин как трафарет, намечаем места крепежных отверстий балки к центральным пластинам:

В намеченных места сверлом диаметром 3 мм сверлим сквозные отверстия:

На краю балки, где будет крепиться двигатель, ровно посередине между крпежными отверстиями, сверлим отверстие диаметром 8 мм - в это отверстие будет проходить выступающий вал двигателя, а диаметр этого отверстия не позволит зацепляться за балку стопорную шайбу на оси двигателя:

Отверстия с нижней стороны балки, расположенные напротив 3 мм крепежных отверстий рассверливаем до 6 мм - они необходимы для того. чтобы вставить отвертку для заворачивания крепежных болтов. Отверстие с нижней стороны, ближайшее к центру аппарата, сверлим диаметром 8 мм - в него еще будут продеваться фазные провода двигателей.
Края всех отверстий обрабатываем зенкером,чтобы избежать заусениц. В итоге мы должны получить вот такие отверстия на концах балок (на фото показана верхняя и нижняя сторона):
Нижняя сторона балок:

Верхняя сторона балок:

Соединение балок и центральных пластин
Соединяем балки и центральные пластины 3 мм болтами с гайками с полиэтиленовыми вставками. При этом в центре балки прикрепляем короткими болтами (16 мм), вставляя их с нижней стороны, а по краям центральной пластины применяем длинные (20 мм) болты, вставляя их со стороны верхней пластины:

Обращаем внимание на взаимное расположение верхней и нижней пластин для обеспечения выбранной схемы - угол со стрелкой на основной плате (следовательно и угловое крепежное отверстие) должны быть направлены в развал между балками первого и третьего двигателя:
Подготовка места для аккумуляторной батареи
К стойкам из алюминиевой трубки, которые были ранее прикреплены к нижней пластине, болтами M4 приворачиваем пластину для аккумуляторной батареи:

Вид сверху собранных центральных пластин и балок:

Вес собранной конструкции:

После покраски наша рама будет выглядеть вот так:

Изготовление посадочных опор
Из алюминиевой полосы шириной 15 мм и алюминиевого прутка диаметром 6 мм готовим вот такие детали посадочных опор:

Длина посадочных опор подбирается индивидуально исходя из размеров подвеса камеры, который будет использоваться - посадочные опоры не должны допускать касания подвеса опорной поверхности, на которую устанавливается мультикоптер.
Соединяем вышеуказанные детали при помощи армированного скотча:

Для эстетических целей облекаем места посадочных опор, в которых намотан скотч в термоусадочную трубку соотвествующего диаметра, а также готовим нижние части посадочных опор с Т-образными резиновыми соединителями:

Нижняя часть посадочных опор с Т-образными резиновыми соединителями:

На верхней части посадочных опор намечаем места, соответствующие выступающим болтам крепления балок, сверлим в этих местах отверстия диаметром 3,5 мм, вставляем посадочные опоры в выступающие части болтов и закрепляем их барашками с резьбой М3:

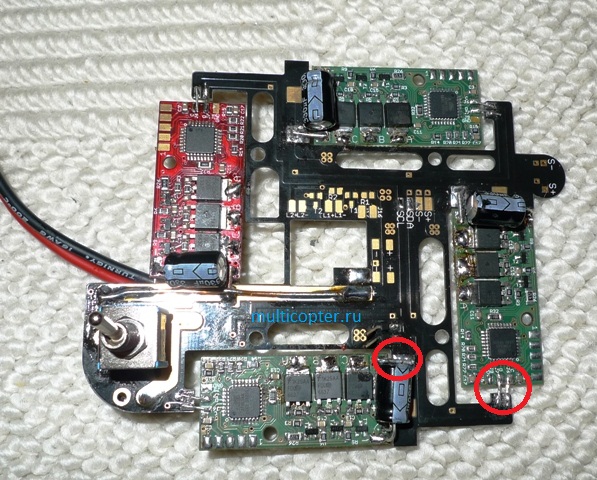
Монтаж контроллеров двигателей на плату-адаптер
Для монтажа контроллеров на плате-адаптере используем отрезки медного провода без изоляции (на фото).

Далее припаиваем:
- фазные провода к площадкам контроллеров (предварительно готовим провода - отрезаем нужную длину, чтобы достать от центра рамы до фаз двигателя и припаиваем к концам фазных проводов разъемы типа "банан" - "мама") - длину проводов рекомендуем делать с запасом около 4 см;
- провода питания от платы-адаптера к батарее припаиваются к округлым площадкам на нижней части платы-адаптера, на другом конце проводов - обязательно разъем "папа", т.к. "мама" будет на проводах батареи;
- провода питания от платы адаптера к Основной плате (длиной 5-6 см) припаиваются к площадкам "+" и "-" на верхней поверхности платы-адаптера, на конце этих проводов припаивается разъем типа "мама", т.к. разъем "папа" будет на концах проводов питания, идущих от Основной платы к плате-адаптеру;
- к нижней поверхности Основной платы припаиваем провода питания (длиной до 8 см): плюсовой провод к площадке J6, минусовой - к квадратной площадке (GND), на другом конце проводов - разъем типа "папа", совместимый с идущим от платы-адаптера;
- провода шины I2C от платы-адаптера к Основной плате (длиной 5-6 см) - припаиваются на Основной плате к площадкам "C" и "D" и на плате-адаптере к площадкам "C" и "D", между Основной платой и платой-адаптером устанавливаем разъем, по типу отличающийся от разъема питания - чтобы исключить случайное перепутывание при соединении;
- тумблер включения-выключения питания (любой двухпозиционный тумблер с шестью или тремя выходами, рассчитанный на возможно больший ток - вот образец) припаиваем к площадкам платы - адаптера;
- внимательно проверяем все соединения, чтобы исключить переполюсовку;
Размещая контроллеры на плате-адаптере, обращаем внимание, чтобы контроллеры были направлены к соответствующим им двигателям (по выбранной конфигурации - см. выше). Для удобства проставляем номера контроллеров на плате-адаптере.
Внимание! Для подключения Основной платы к плате-адаптеру используем разъемы (мы применили DEANS), отличающиеся от разъемов, применяемых для шины I2C (мы применили Tamiya) - для предотвращения случайного неправильного подключения, которое может привести к выходу из строя Основной платы.
Внимание! Перед монтажом контроллеров на плату-адаптер необходимо замкнуть на них площадки для назначения адресов, как указано в разделе сайта "Контроллеры двигателей".
Дальше >>>
Обсудить на форуме
|